python怎么使用OpenCV实现多目标跟踪
小伙伴们有没有觉得学习文章很有意思?有意思就对了!今天就给大家带来《python怎么使用OpenCV实现多目标跟踪》,以下内容将会涉及到,若是在学习中对其中部分知识点有疑问,或许看了本文就能帮到你!
1 背景介绍
计算机视觉和机器学习的大多数初学者都学习对象检测。如果您是初学者,您可能会想到为什么我们需要对象跟踪。我们不能只检测每一帧中的物体吗?
让我们探讨一下跟踪有用的几个原因:
首先,当在视频帧中检测到多个对象(比如人)时,跟踪有助于跨帧确定对象的身份。
其次,在某些情况下,目标检测可能会失败,但仍可能跟踪对象,因为跟踪会考虑前一帧中对象的位置和外观。
第三,一些跟踪算法非常快,因为它们进行本地搜索而不是全局搜索。因此,我们可以通过每第n帧执行目标检测并在中间帧中跟踪对象来为我们的系统获得非常高的性能。
那么,为什么不在第一次检测后无限期地跟踪对象呢?跟踪算法有时可能会丢失其正在跟踪的对象。例如,当对象的运动太大时,跟踪算法可能无法跟上。通常会在目标跟踪一段时间后再次目标检测。
在本教程中,我们将只关注跟踪部分。我们要跟踪的对象将通过指定它们周围的边界框来获取。
2 基于MultiTracker的多目标跟踪
OpenCV中的多目标跟踪器MultiTracker类提供了多目标跟踪的实现。但是这只是一个初步的实现,因为它只处理跟踪对象,而不对被跟踪对象进行任何优化。
2.1 创建单个对象跟踪器
多对象跟踪器只是单个对象跟踪器的集合。我们首先定义一个将跟踪器类型作为输入并创建跟踪器对象的函数。
OpenCV有8种不同的跟踪器类型:BOOSTING,MIL,KCF,TLD,MEDIANFLOW,GOTURN,MOSSE,CSRT。本文不使用GOTURN跟踪器。一般我们先给定跟踪器类的名称,再返回单跟踪器对象,然后建立多跟踪器类。
C++代码:
vector<string> trackerTypes = {"BOOSTING", "MIL", "KCF", "TLD", "MEDIANFLOW", "GOTURN", "MOSSE", "CSRT"};
/**
* @brief Create a Tracker By Name object 根据设定的类型初始化跟踪器
*
* @param trackerType
* @return Ptr<Tracker>
*/
Ptr<Tracker> createTrackerByName(string trackerType)
{
Ptr<Tracker> tracker;
if (trackerType == trackerTypes[0])
tracker = TrackerBoosting::create();
else if (trackerType == trackerTypes[1])
tracker = TrackerMIL::create();
else if (trackerType == trackerTypes[2])
tracker = TrackerKCF::create();
else if (trackerType == trackerTypes[3])
tracker = TrackerTLD::create();
else if (trackerType == trackerTypes[4])
tracker = TrackerMedianFlow::create();
else if (trackerType == trackerTypes[5])
tracker = TrackerGOTURN::create();
else if (trackerType == trackerTypes[6])
tracker = TrackerMOSSE::create();
else if (trackerType == trackerTypes[7])
tracker = TrackerCSRT::create();
else
{
cout << "Incorrect tracker name" << endl;
cout << "Available trackers are: " << endl;
for (vector<string>::iterator it = trackerTypes.begin(); it != trackerTypes.end(); ++it)
{
std::cout << " " << *it << endl;
}
}
return tracker;
}python代码:
from __future__ import print_function
import sys
import cv2
from random import randint
trackerTypes = ['BOOSTING', 'MIL', 'KCF','TLD', 'MEDIANFLOW', 'GOTURN', 'MOSSE', 'CSRT']
def createTrackerByName(trackerType):
# Create a tracker based on tracker name
if trackerType == trackerTypes[0]:
tracker = cv2.TrackerBoosting_create()
elif trackerType == trackerTypes[1]:
tracker = cv2.TrackerMIL_create()
elif trackerType == trackerTypes[2]:
tracker = cv2.TrackerKCF_create()
elif trackerType == trackerTypes[3]:
tracker = cv2.TrackerTLD_create()
elif trackerType == trackerTypes[4]:
tracker = cv2.TrackerMedianFlow_create()
elif trackerType == trackerTypes[5]:
tracker = cv2.TrackerGOTURN_create()
elif trackerType == trackerTypes[6]:
tracker = cv2.TrackerMOSSE_create()
elif trackerType == trackerTypes[7]:
tracker = cv2.TrackerCSRT_create()
else:
tracker = None
print('Incorrect tracker name')
print('Available trackers are:')
for t in trackerTypes:
print(t)
return tracker2.2 读取视频的第一帧
多对象跟踪器需要两个输入即一个视频帧和我们想要跟踪的所有对象的位置(边界框)。
给定此信息,跟踪器在所有后续帧中跟踪这些指定对象的位置。在下面的代码中,我们首先使用VideoCapture类加载视频并读取第一帧。稍后将使用它来初始化MultiTracker。
C++代码:
// Set tracker type. Change this to try different trackers. 选择追踪器类型 string trackerType = trackerTypes[6]; // set default values for tracking algorithm and video 视频读取 string videoPath = "video/run.mp4"; // Initialize MultiTracker with tracking algo 边界框 vectorbboxes; // create a video capture object to read videos 读视频 cv::VideoCapture cap(videoPath); Mat frame; // quit if unable to read video file if (!cap.isOpened()) { cout << "Error opening video file " << videoPath << endl; return -1; } // read first frame 读第一帧 cap >> frame;
python代码:
# Set video to load
videoPath = "video/run.mp4"
# Create a video capture object to read videos
cap = cv2.VideoCapture(videoPath)
# Read first frame
success, frame = cap.read()
# quit if unable to read the video file
if not success:
print('Failed to read video')
sys.exit(1)2.3 在第一帧中确定我们跟踪的对象
接下来,我们需要在第一帧中找到我们想要跟踪的对象。OpenCV提供了一个名为selectROIs的函数,它弹出一个GUI来选择边界框(也称为感兴趣区域(ROI))。在C++版本中可以通过selectROIs允许您获取多个边界框,但在Python版本中,只能通过selectROI获得一个边界框。因此,在Python版本中,我们需要一个循环来获取多个边界框。对于每个对象,我们还选择随机颜色来显示边界框。selectROI函数步骤为先在图像上画框,然后按ENTER确定完成画框画下一个框。按ESC退出画框开始执行程序
C++代码:
// Get bounding boxes for first frame
// selectROI's default behaviour is to draw box starting from the center
// when fromCenter is set to false, you can draw box starting from top left corner
bool showCrosshair = true;
bool fromCenter = false;
cout << "\n==========================================================\n";
cout << "OpenCV says press c to cancel objects selection process" << endl;
cout << "It doesn't work. Press Escape to exit selection process" << endl;
cout << "\n==========================================================\n";
cv::selectROIs("MultiTracker", frame, bboxes, showCrosshair, fromCenter);
// quit if there are no objects to track
if(bboxes.size() < 1)
return 0;
vector<Scalar> colors;
getRandomColors(colors, bboxes.size());// Fill the vector with random colors void getRandomColors(vector& colors, int numColors) { RNG rng(0); for(int i=0; i < numColors; i++) colors.push_back(Scalar(rng.uniform(0,255), rng.uniform(0, 255), rng.uniform(0, 255))); }
python代码:
## Select boxes
bboxes = []
colors = []
# OpenCV's selectROI function doesn't work for selecting multiple objects in Python
# So we will call this function in a loop till we are done selecting all objects
while True:
# draw bounding boxes over objects
# selectROI's default behaviour is to draw box starting from the center
# when fromCenter is set to false, you can draw box starting from top left corner
bbox = cv2.selectROI('MultiTracker', frame)
bboxes.append(bbox)
colors.append((randint(0, 255), randint(0, 255), randint(0, 255)))
print("Press q to quit selecting boxes and start tracking")
print("Press any other key to select next object")
k = cv2.waitKey(0) & 0xFF
if (k == 113): # q is pressed
break
print('Selected bounding boxes {}'.format(bboxes))2.4 初始化MultiTrackerer
到目前为止,我们已经读取了第一帧并获得了对象周围的边界框。这是我们初始化多对象跟踪器所需的所有信息。我们首先创建一个MultiTracker对象,并添加你要跟踪目标数的单个对象跟踪器。在此示例中,我们使用CSRT单个对象跟踪器,但您可以通过将下面的trackerType变量更改为本文开头提到的8个跟踪器时间之一来尝试其他跟踪器类型。该CSRT跟踪器是不是最快的,但它产生在我们尝试很多情况下,最好的结果。
您也可以使用包含在同一MultiTracker中的不同跟踪器,但当然,它没有多大意义。能用的不多。CSRT精度最高,KCF速度精度综合最好,MOSSE速度最快。
MultiTracker类只是这些单个对象跟踪器的包装器。正如我们在上一篇文章中所知道的那样,使用第一帧和边界框初始化单个对象跟踪器,该边界框指示我们想要跟踪的对象的位置。MultiTracker将此信息传递给它内部包装的单个目标跟踪器。
C++代码:
// Create multitracker 创建多目标跟踪类
Ptr<MultiTracker> multiTracker = cv::MultiTracker::create();
// initialize multitracker 初始化
for (int i = 0; i < bboxes.size(); i++)
{
multiTracker->add(createTrackerByName(trackerType), frame, Rect2d(bboxes[i]));
}python代码:
# Specify the tracker type trackerType = "CSRT" # Create MultiTracker object multiTracker = cv2.MultiTracker_create() # Initialize MultiTracker for bbox in bboxes: multiTracker.add(createTrackerByName(trackerType), frame, bbox)
2.5 更新MultiTracker和显示结果
最后,我们的MultiTracker准备就绪,我们可以在新的帧中跟踪多个对象。我们使用MultiTracker类的update方法在新帧中定位对象。每个被跟踪对象的每个边界框都使用不同的颜色绘制。
Update函数会返回true和false。update如果跟踪失败会返回false,C++代码加了判断,Python没有加。但是要注意的是update函数哪怕返回了false,也会继续更新函数,给出边界框。所以返回false,建议停止追踪。
C++代码:
while (cap.isOpened())
{
// get frame from the video 逐帧处理
cap >> frame;
// stop the program if reached end of video
if (frame.empty())
{
break;
}
//update the tracking result with new frame 更新每一帧
bool ok = multiTracker->update(frame);
if (ok == true)
{
cout << "Tracking success" << endl;
}
else
{
cout << "Tracking failure" << endl;
}
// draw tracked objects 画框
for (unsigned i = 0; i < multiTracker->getObjects().size(); i++)
{
rectangle(frame, multiTracker->getObjects()[i], colors[i], 2, 1);
}
// show frame
imshow("MultiTracker", frame);
// quit on x button
if (waitKey(1) == 27)
{
break;
}
}python代码:
# Process video and track objects
while cap.isOpened():
success, frame = cap.read()
if not success:
break
# get updated location of objects in subsequent frames
success, boxes = multiTracker.update(frame)
# draw tracked objects
for i, newbox in enumerate(boxes):
p1 = (int(newbox[0]), int(newbox[1]))
p2 = (int(newbox[0] + newbox[2]), int(newbox[1] + newbox[3]))
cv2.rectangle(frame, p1, p2, colors[i], 2, 1)
# show frame
cv2.imshow('MultiTracker', frame)
# quit on ESC button
if cv2.waitKey(1) & 0xFF == 27: # Esc pressed
break3 结果和代码
就结果而言,多目标跟踪就是生成多个单目标跟踪器,每个单目标跟踪器跟踪一个对象。如果你想和目标检测结合,其中的对象框如果要自己设定,push一个Rect对象就行了。
//自己设定对象的检测框
//x,y,width,height
//bboxes.push_back(Rect(388, 155, 30, 40));
//bboxes.push_back(Rect(492, 205, 50, 80));
总体来说精度和单目标跟踪器差不多,所耗时间差不多5到7倍,不同算法不同。
完整代码如下:
C++:
// Opencv_MultiTracker.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。 // #include "pch.h" #include#include #include using namespace cv; using namespace std; vector trackerTypes = {"BOOSTING", "MIL", "KCF", "TLD", "MEDIANFLOW", "GOTURN", "MOSSE", "CSRT"}; /** * @brief Create a Tracker By Name object 根据设定的类型初始化跟踪器 * * @param trackerType * @return Ptr */ Ptr createTrackerByName(string trackerType) { Ptr tracker; if (trackerType == trackerTypes[0]) tracker = TrackerBoosting::create(); else if (trackerType == trackerTypes[1]) tracker = TrackerMIL::create(); else if (trackerType == trackerTypes[2]) tracker = TrackerKCF::create(); else if (trackerType == trackerTypes[3]) tracker = TrackerTLD::create(); else if (trackerType == trackerTypes[4]) tracker = TrackerMedianFlow::create(); else if (trackerType == trackerTypes[5]) tracker = TrackerGOTURN::create(); else if (trackerType == trackerTypes[6]) tracker = TrackerMOSSE::create(); else if (trackerType == trackerTypes[7]) tracker = TrackerCSRT::create(); else { cout << "Incorrect tracker name" << endl; cout << "Available trackers are: " << endl; for (vector ::iterator it = trackerTypes.begin(); it != trackerTypes.end(); ++it) { std::cout << " " << *it << endl; } } return tracker; } /** * @brief Get the Random Colors object 随机涂色 * * @param colors * @param numColors */ void getRandomColors(vector &colors, int numColors) { RNG rng(0); for (int i = 0; i < numColors; i++) { colors.push_back(Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255))); } } int main(int argc, char *argv[]) { // Set tracker type. Change this to try different trackers. 选择追踪器类型 string trackerType = trackerTypes[7]; // set default values for tracking algorithm and video 视频读取 string videoPath = "video/run.mp4"; // Initialize MultiTracker with tracking algo 边界框 vector bboxes; // create a video capture object to read videos 读视频 cv::VideoCapture cap(videoPath); Mat frame; // quit if unable to read video file if (!cap.isOpened()) { cout << "Error opening video file " << videoPath << endl; return -1; } // read first frame 读第一帧 cap >> frame; // draw bounding boxes over objects 在第一帧内确定对象框 /* 先在图像上画框,然后按ENTER确定画下一个框。按ESC退出画框开始执行程序 */ cout << "\n==========================================================\n"; cout << "OpenCV says press c to cancel objects selection process" << endl; cout << "It doesn't work. Press Esc to exit selection process" << endl; cout << "\n==========================================================\n"; cv::selectROIs("MultiTracker", frame, bboxes, false); //自己设定对象的检测框 //x,y,width,height //bboxes.push_back(Rect(388, 155, 30, 40)); //bboxes.push_back(Rect(492, 205, 50, 80)); // quit if there are no objects to track 如果没有选择对象 if (bboxes.size() < 1) { return 0; } vector colors; //给各个框涂色 getRandomColors(colors, bboxes.size()); // Create multitracker 创建多目标跟踪类 Ptr multiTracker = cv::MultiTracker::create(); // initialize multitracker 初始化 for (int i = 0; i < bboxes.size(); i++) { multiTracker->add(createTrackerByName(trackerType), frame, Rect2d(bboxes[i])); } // process video and track objects 开始处理图像 cout << "\n==========================================================\n"; cout << "Started tracking, press ESC to quit." << endl; while (cap.isOpened()) { // get frame from the video 逐帧处理 cap >> frame; // stop the program if reached end of video if (frame.empty()) { break; } //update the tracking result with new frame 更新每一帧 bool ok = multiTracker->update(frame); if (ok == true) { cout << "Tracking success" << endl; } else { cout << "Tracking failure" << endl; } // draw tracked objects 画框 for (unsigned i = 0; i < multiTracker->getObjects().size(); i++) { rectangle(frame, multiTracker->getObjects()[i], colors[i], 2, 1); } // show frame imshow("MultiTracker", frame); // quit on x button if (waitKey(1) == 27) { break; } } waitKey(0); return 0; }
Python:
from __future__ import print_function
import sys
import cv2
from random import randint
trackerTypes = ['BOOSTING', 'MIL', 'KCF','TLD', 'MEDIANFLOW', 'GOTURN', 'MOSSE', 'CSRT']
def createTrackerByName(trackerType):
# Create a tracker based on tracker name
if trackerType == trackerTypes[0]:
tracker = cv2.TrackerBoosting_create()
elif trackerType == trackerTypes[1]:
tracker = cv2.TrackerMIL_create()
elif trackerType == trackerTypes[2]:
tracker = cv2.TrackerKCF_create()
elif trackerType == trackerTypes[3]:
tracker = cv2.TrackerTLD_create()
elif trackerType == trackerTypes[4]:
tracker = cv2.TrackerMedianFlow_create()
elif trackerType == trackerTypes[5]:
tracker = cv2.TrackerGOTURN_create()
elif trackerType == trackerTypes[6]:
tracker = cv2.TrackerMOSSE_create()
elif trackerType == trackerTypes[7]:
tracker = cv2.TrackerCSRT_create()
else:
tracker = None
print('Incorrect tracker name')
print('Available trackers are:')
for t in trackerTypes:
print(t)
return tracker
if __name__ == '__main__':
print("Default tracking algoritm is CSRT \n"
"Available tracking algorithms are:\n")
for t in trackerTypes:
print(t)
trackerType = "CSRT"
# Set video to load
videoPath = "video/run.mp4"
# Create a video capture object to read videos
cap = cv2.VideoCapture(videoPath)
# Read first frame
success, frame = cap.read()
# quit if unable to read the video file
if not success:
print('Failed to read video')
sys.exit(1)
## Select boxes
bboxes = []
colors = []
# OpenCV's selectROI function doesn't work for selecting multiple objects in Python
# So we will call this function in a loop till we are done selecting all objects
while True:
# draw bounding boxes over objects
# selectROI's default behaviour is to draw box starting from the center
# when fromCenter is set to false, you can draw box starting from top left corner
bbox = cv2.selectROI('MultiTracker', frame)
bboxes.append(bbox)
colors.append((randint(64, 255), randint(64, 255), randint(64, 255)))
print("Press q to quit selecting boxes and start tracking")
print("Press any other key to select next object")
k = cv2.waitKey(0) & 0xFF
if (k == 113): # q is pressed
break
print('Selected bounding boxes {}'.format(bboxes))
## Initialize MultiTracker
# There are two ways you can initialize multitracker
# 1. tracker = cv2.MultiTracker("CSRT")
# All the trackers added to this multitracker
# will use CSRT algorithm as default
# 2. tracker = cv2.MultiTracker()
# No default algorithm specified
# Initialize MultiTracker with tracking algo
# Specify tracker type
# Create MultiTracker object
multiTracker = cv2.MultiTracker_create()
# Initialize MultiTracker
for bbox in bboxes:
multiTracker.add(createTrackerByName(trackerType), frame, bbox)
# Process video and track objects
while cap.isOpened():
success, frame = cap.read()
if not success:
break
# get updated location of objects in subsequent frames
success, boxes = multiTracker.update(frame)
# draw tracked objects
for i, newbox in enumerate(boxes):
p1 = (int(newbox[0]), int(newbox[1]))
p2 = (int(newbox[0] + newbox[2]), int(newbox[1] + newbox[3]))
cv2.rectangle(frame, p1, p2, colors[i], 2, 1)
# show frame
cv2.imshow('MultiTracker', frame)
# quit on ESC button
if cv2.waitKey(1) & 0xFF == 27: # Esc pressed
break今天关于《python怎么使用OpenCV实现多目标跟踪》的内容介绍就到此结束,如果有什么疑问或者建议,可以在golang学习网公众号下多多回复交流;文中若有不正之处,也希望回复留言以告知!
 Win11打开文件夹延迟怎么办?Win11打开文件夹延迟问题解析
Win11打开文件夹延迟怎么办?Win11打开文件夹延迟问题解析
- 上一篇
- Win11打开文件夹延迟怎么办?Win11打开文件夹延迟问题解析
- 下一篇
- 广州发布文件促进游戏和电竞产业高质量发展,首创中国游戏产业大数据信息服务平台
-
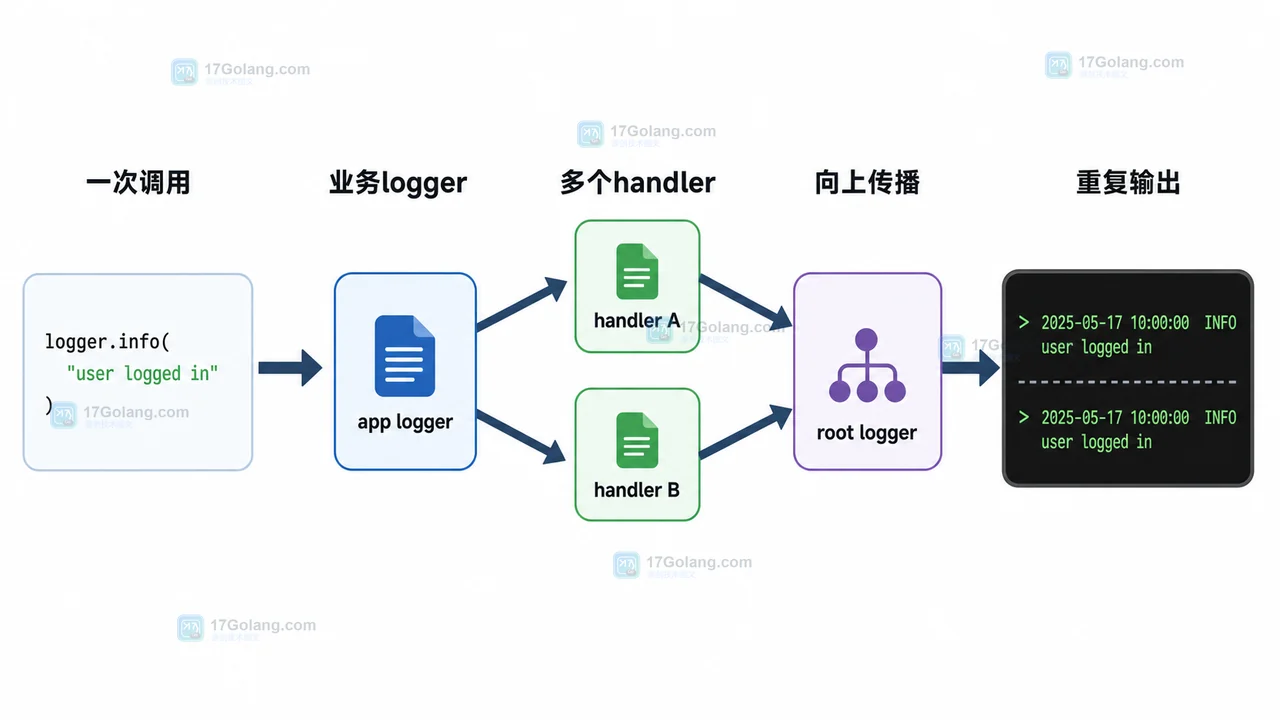
- 文章 · python教程 | 3天前 | logging · Python教程 · 后端开发 · 日志排查 · Python logging 日志重复 propagate addHandler basicConfig
- Python logging 日志重复打印排查:为什么一条记录输出了两遍
- 324浏览 收藏
-
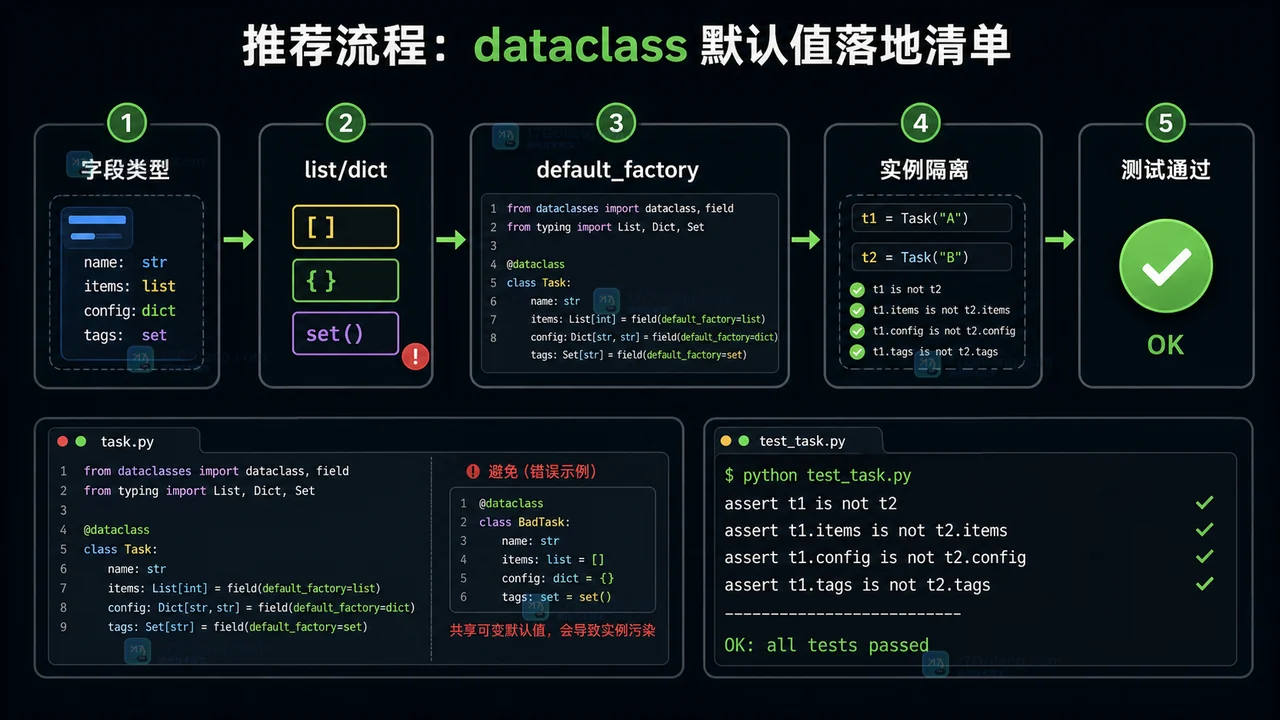
- 文章 · python教程 | 2星期前 | 默认值 · python · 数据建模 · dataclass · default_factory · field · Python 数据类 Field 可变默认值 dataclass default_factory
- Python dataclass 默认值完整工作流:从可变默认值到 default_factory
- 228浏览 收藏

-

- 前端进阶之JavaScript设计模式
- 设计模式是开发人员在软件开发过程中面临一般问题时的解决方案,代表了最佳的实践。本课程的主打内容包括JS常见设计模式以及具体应用场景,打造一站式知识长龙服务,适合有JS基础的同学学习。
- 543次学习
-

- GO语言核心编程课程
- 本课程采用真实案例,全面具体可落地,从理论到实践,一步一步将GO核心编程技术、编程思想、底层实现融会贯通,使学习者贴近时代脉搏,做IT互联网时代的弄潮儿。
- 516次学习
-

- 简单聊聊mysql8与网络通信
- 如有问题加微信:Le-studyg;在课程中,我们将首先介绍MySQL8的新特性,包括性能优化、安全增强、新数据类型等,帮助学生快速熟悉MySQL8的最新功能。接着,我们将深入解析MySQL的网络通信机制,包括协议、连接管理、数据传输等,让
- 500次学习
-

- JavaScript正则表达式基础与实战
- 在任何一门编程语言中,正则表达式,都是一项重要的知识,它提供了高效的字符串匹配与捕获机制,可以极大的简化程序设计。
- 487次学习
-

- 从零制作响应式网站—Grid布局
- 本系列教程将展示从零制作一个假想的网络科技公司官网,分为导航,轮播,关于我们,成功案例,服务流程,团队介绍,数据部分,公司动态,底部信息等内容区块。网站整体采用CSSGrid布局,支持响应式,有流畅过渡和展现动画。
- 485次学习
-
- ljg-skills
- ljg-skills 是李继刚开源的 AI 技能与提示词集合,面向大模型使用者整理了一批可复用的 prompt、角色设定和任务技能模板,适合用于学习提示词设计、搭建个人 AI 工作流和沉淀团队常用智能体能力。
- 3157次使用
-

- MELO音乐
- MELO音乐是一站式AI视频与音乐制作助手,对标suno, udio的高品质体验。提供伴奏生成、原创写词、无损导出、哼唱识曲、混音变声等全套音频与短视频编辑工具。无论是流行Kpop、电音说唱、民谣古风、摇滚儿歌还是商用轻音乐,MELO为你免费谱曲,轻松做同款!
- 2919次使用
-

- UniScribe
- UniScribe 是一款 AI 音视频转文字与内容整理工具,支持上传音频、视频文件或粘贴 YouTube 链接,自动生成转写文本、摘要、思维导图和关键问题,并支持多格式导出,适合会议记录、课程学习、访谈整理和内容创作复盘。
- 2872次使用
-

- 剧云
- 剧云是专业中文剧本创作平台,安全稳定运行十余年,集成AI编剧、剧本医生审核、人物小传、剧情关系图、大纲编写、多人协作、Word导入导出、版权管控功能,数据安全防护,轻松高效创作剧本。
- 3078次使用
-

- 万象有声
- 万象有声,一个专为有声创作者打造的新一代智能有声内容创作平台。平台提供专业的智能拆章、智能画本编辑、AI配音、AI生成音效、后期制作、智能对轨、智能审听等有声创作全流程工具,可以帮助创作者高效、低成本创作出引人入胜的有声作品。立即体验,让有声书制作更简单!
- 3033次使用
-
- Python监控网页状态:requests异常处理实战
- 2026-05-29 501浏览
-
- TensorFlow模型部署为API的TF Serving方法
- 2026-05-26 501浏览
-
- Python字符串编码转换:encode与decode详解
- 2026-05-16 501浏览
-
- TensorFlow裁剪无用算子方法详解
- 2026-05-15 501浏览
-
- httpx 如何设置代理认证(Proxy-Authorization)
- 2026-05-05 501浏览


